前言
以前对微线程、协程等概念非常模糊,不知道这些东西相对于线程来说有啥区别,微线程的作用是什么?
来到腾讯之后接触到了一种全新的网络开发框架,他使用微线程实现了使用同步的开发模式,而性能却可以达到异步模式的水平(类似于Go语言的协程概念)。
腾讯QQ后台的大多数模块都是基于此框架开发的,本人对这种网络编程模式非常感兴趣,计划写几篇文章好好分析研究一下他的源码。
微线程的代码腾讯已经在Github上开源了,可以在这里下载:微线程代码
微线程简介
首先介绍一下微线程的概念,以及它和传统线程之间的区别:
- 微线程是一种用户态
线程,也就是说微线程的运行、调度、切换都是在用户空间由用户自己写的代码完成的,而传统线程的调度切换是在内核空间由操作系统完成的。 - 站在操作系统的角度来看微线程都是在单线程中运行的,所以无法利用CPU的多核资源,而传统线程是可以在多核上运行的,解决这个问题的办法一般是开多个进程同时运行。
在用户空间完成微线程调度有什么好处了?
- 第一微线程调度的时候不需要陷入内核;
- 第二微线程切换的开销相对于传统线程来说非常小,基本等于一次函数调用的开销;
- 第三微线程的调度时机是用户自己决定的,而传统线程的调度时机完全由内核决定;
总的来说就是微线程的切换开销非常小,这样就可以做到大量微线程并发执行。而传统线程一旦并发量太大时,线程之间的切换是一个非常大的开销,导致整体运行效率非常低。
基于微线程的网络开发框架
传统网络开发框架有两种模式:
- 多线程同步模式,每来一个请求开一个线程来处理,这样进程的创建和销毁是一个非常大的开销,所以又演变为使用线程池来避免线程的频繁创建、销毁, 但是当请求并发量太大时线程的调度切换就成了瓶颈,并且操作系统对线程的最大数量有限制,所以这种模式不适合高并发场景。
- 基于
select/epoll网络多路复用的异步模式,这种异步模式可以满足高并发需求,但是由于他是异步的,所以需要保存每次网络请求的上下文维护网络状态,基于状态调度完成请求。 这种模式的缺点是代码逻辑不清晰,难以阅读,状态之间相互依赖,代码的开发维护难度大(nginx就是使用的这种模式)。
基于微线程的网络开发框架就是为了解决上述缺点的,对于高并发这个问题微线程使用epoll多路复用来满足需求,对于异步的状态调度问题使用微线程调度来解决:当网络请求进入阻塞时保存当前微线程的上下文,并恢复下一个就绪微线程的上下文,完成微线程的调度切换,当没有就绪微线程的时候,则进入epoll_wait阻塞整个进程。这样就实现了同步的编码逻辑、异步的执行效果。
微线程调度机制
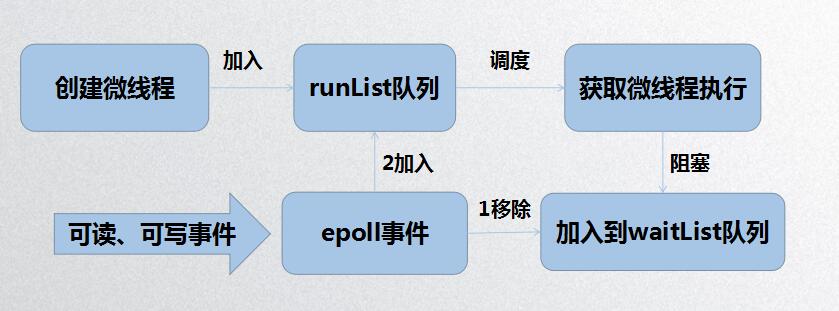
线程调度时机:
- 用户调用
mt_exec_all_task创建微线程,并将新建的微线程加入到_runlist队列,然后调度微线程; - 微线程中调用
mt_udpsendrcv发送、接收数据包,调用send发送数据包,如果发送缓冲区已满,还有数据待发送时将调度微线程; - 微线程调用
recvfrom接收数据报时,直接调度微线程; epoll接收到数据包之后,获取此数据包的微线程实例,将此微线程移除_waitlist队列,加入到_runlist队列中,然后调度微线程执行,从当时被调度的地方继续执行;- 当
_runlist队列中没有可运行的微线程时,整个进程阻塞在epoll_wait系统调用上;
注:调度微线程的意思是将当前线程保存上下文加入_waitlist队列,然后从_runlist队列中获取下一个运行的微线程恢复上下文。
微线程测试Demo
/**
* @file mt_alone.cpp
* @info 微线程单独使用事例
*/
#include <stdio.h>
#include <string.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "mt_incl.h"
#define REMOTE_IP "127.0.0.1"
#define REMOTE_PORT 5574
#define SEND_PKG "hello world"
#define SEND_PKG_LEN (sizeof(SEND_PKG) - 1)
// Task事例类:使用UDP单发单收接口
class UdpSndRcvTask
: public IMtTask
{
public:
virtual int Process() {
// 获取目的地址信息, 简单示例
static struct sockaddr_in server_addr;
static int initflg = 0;
if (!initflg) {
memset(&server_addr, 0, sizeof(server_addr));
server_addr.sin_family = AF_INET;
server_addr.sin_addr.s_addr = inet_addr(REMOTE_IP);
server_addr.sin_port = htons(REMOTE_PORT);
initflg = 1;
}
char buff[1024] = SEND_PKG;
int max_len = sizeof(buff);
int ret = mt_udpsendrcv(&server_addr, (void*)buff, SEND_PKG_LEN, buff, max_len, 100);
if (ret < 0)
{
printf("mt_udpsendrcv failed, ret %d\n", ret);
return -1;
}
else
{
printf("UdpSndRcvTask recvd: %s\n", buff);
return 0;
}
};
};
// 检查报文是否接受完成
int CheckPkgLen(void *buf, int len) {
if (len < (int)SEND_PKG_LEN)
{
return 0;
}
return SEND_PKG_LEN;
}
// Task事例类,使用TCP连接池单发单收接口
class TcpSndRcvTask
: public IMtTask
{
public:
virtual int Process() {
// 获取目的地址信息, 简单示例
static struct sockaddr_in server_addr;
static int initflg = 0;
if (!initflg) {
memset(&server_addr, 0, sizeof(server_addr));
server_addr.sin_family = AF_INET;
server_addr.sin_addr.s_addr = inet_addr(REMOTE_IP);
server_addr.sin_port = htons(REMOTE_PORT);
initflg = 1;
}
char buff[1024] = SEND_PKG;
int max_len = sizeof(buff);
int ret = mt_tcpsendrcv(&server_addr, (void*)buff, SEND_PKG_LEN, buff, max_len, 100, CheckPkgLen);
if (ret < 0)
{
printf("mt_tcpsendrcv failed, ret %d\n", ret);
return -1;
}
else
{
printf("TcpSndRcvTask recvd: %s\n", buff);
return 0;
}
};
};
// Task事例类: 业务可以用来验证微线程API可用性
class ApiVerifyTask
: public IMtTask
{
public:
virtual int Process() {
// 调用业务使用微线程API
printf("This is the api verify task!!!\n");
return 0;
};
};
int main(void)
{
// 初始化微线程框架
bool init_ok = mt_init_frame();
if (!init_ok)
{
fprintf(stderr, "init micro thread frame failed.\n");
return -1;
}
// 触发微线程切换
mt_sleep(0);
UdpSndRcvTask task1;
TcpSndRcvTask task2;
ApiVerifyTask task3;
task1.Process();
mt_sleep(5000);
// 现在原生线程已经在demon的调度中了
while (true)
{
// 这里示例一个并发操作
IMtTaskList task_list;
task_list.push_back(&task1);
task_list.push_back(&task2);
task_list.push_back(&task3);
int ret = mt_exec_all_task(task_list);
if (ret < 0)
{
fprintf(stderr, "execult tasks failed, ret:%d", ret);
return -2;
}
// 循环检查每一个task是否执行成功,即Process的返回值
for (unsigned int i = 0; i < task_list.size(); i++)
{
IMtTask *task = task_list[i];
int result = task->GetResult();
if (result < 0)
{
fprintf(stderr, "task(%u) failed, result:%d", i, result);
}
}
printf("\n");
// 睡眠2000ms
mt_sleep(2000);
}
return 0;
}
代码编译
- 下载微线程代码
- 进入
micro_thread目录执行make - 将Demo例程放在
sync_frame目录下,执行下面的编译命令:
g++ mt_alone.cpp ./micro_thread/libmt.so -ldl -I./micro_thread -o mt_alone